SurfelWarp是类似于DynamicFusion的动态重建系统。 与其他动态重建方法相比,surfelwarp使用平坦的surfel数组(而不是体积场)作为几何图形表示,这使管道更鲁棒有效。
摘要
我们贡献了一个密集的SLAM系统,该系统需要实时深度图像流作为输入,并实时重建非刚性变形场景,而无需模板或者先验模型。与现有方法相反,我们不维护-保留任何体积数据结构,例如截断符号距离函数(TSDF)字段或变形字段,它们是性能和内存密集型的。我们的系统有效使用可以直接从商品深度传感器获取的基于平面(surfel)的几何图形表示。标准图形管线和通用GPU(GPGPU)计算可用于所有中央操作:即最近邻维护,非刚性变形场估计 以及深度测量的融合。我们的管道本质上避免了如立方体匹配,体积融合和致密变形场更新等昂贵的体积操作,以至于明显提高性能。此外,显式灵活的基于surfel的几何图形表示可实现高效处理拓扑更改和跟踪故障,这使得我们的重建与最新的深度观测结果一致。我们的系统允许机器人使用非刚性变形的物体,从而可能与动态的工作环境交互。
基于体积和基于表面重建的优劣势
基于体积的方法能生成更平滑的三角网格,但这类方法是性能和内存密集型的。基于表面的重建方法更具效率,但如果需要生成网格模型,则需要后期处理。
系统框架
如下图:
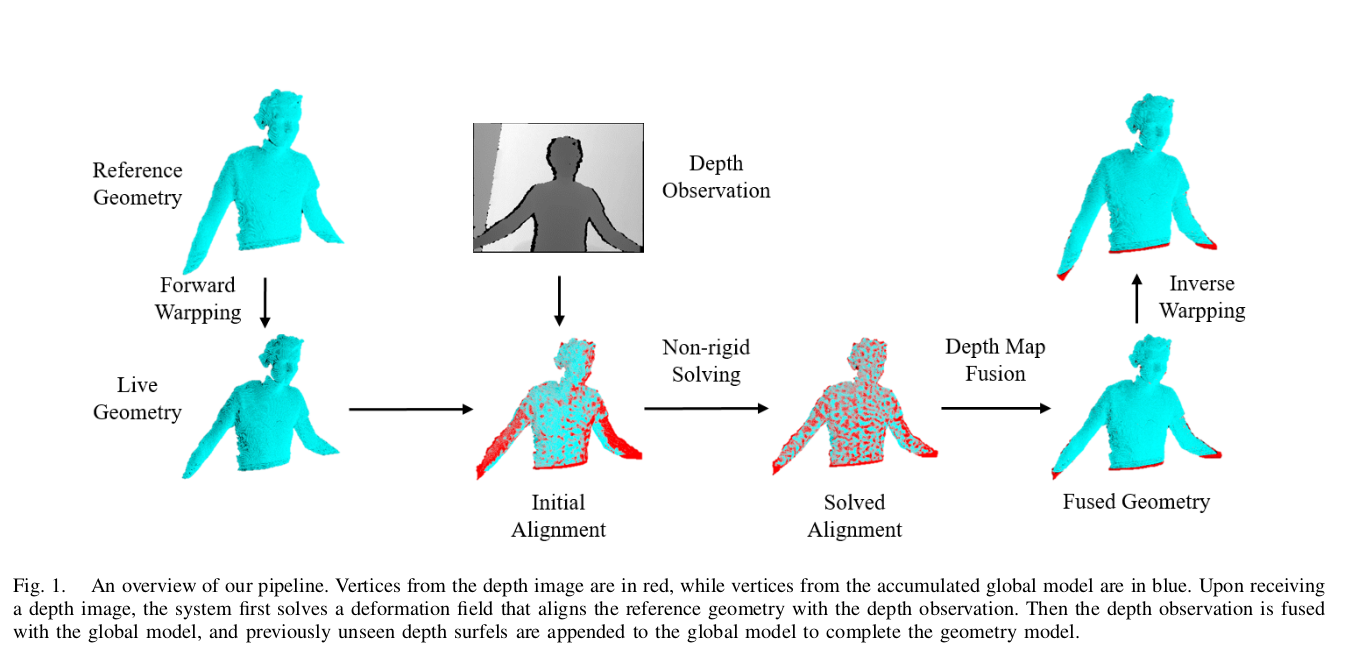
系统逐帧处理输入深度图像,在接收到新的深度图像时,首先通过与迭代最近点类似的方法将当前的深度观察值与参考几何(reference geometry)模型对齐,得到更新后的形变场,再与全局模型做数据融合,最后更新参考几何模型。